

Seit wir 2018 die Idee des Gießroboters hatten und damit die Entwicklung angestoßen haben, ist der Rainos zu einem Lieblingsmitarbeiter von uns geworden.
Wie so oft, klaffen aber die Wünsche des Herstellers und unsere Anforderungen auseinander. 2024 haben wir unseren zweiten Rainos gekauft. Wir haben hier gut eine Woche Arbeitszeit investiert, ordentlich geschraubt und programmiert. Das Ergebnis war brauchbar - aber natürlich haben wir schon wieder Ideen, wie wir es anders machen würden.
Gießroboter-Tuning
Achtung: Ohne Technikkenntnisse ist es trotz dieser Anleitung unmöglich unsere Veränderungen nachzubauen. Wer das machen will, sollte den Gießaufbau machen und sich für den Elektronikteil einen Profi suchen. Wir haften nicht für defekte Roboter oder Stromschläge (auch 48v, wenn man sie mit dem Schraubenzieher verbindet, zischen ordentlich).
Der Rainos kommt vom Werk aus mit zwei Gießrohren rechts und links auf dem Roboter. Jedes Gießrohr wird von einer eigenen Pumpe bedient. Die Pumpen lassen sich drehzahlsteuern. Damit kann man die Gießweite schön regulieren. Für viele einfach und übersichtlich gestaltete Friedhöfe ist das ausreichend. Bei engen und komplexen Friedhöfen kommen die Gießrohre sehr, sehr schnell an ihre Grenzen. Wir haben uns daher den Rainos OHNE Gießrohre bestellt:

Wir sind bei unserer Bedarfsanalyse auf 12 Düsen gekommen, die wir gerne einzeln zum Ansteuern gehabt hätten. Dafür hat der Platz auf dem Rainos nicht gereicht und wir sind bei 12 Düsen, steuerbar über 9 Motorkugelhähne gelandet. Der Aufbau ist typisch Gärtner, mit normalen Bewässerungsmaterialien
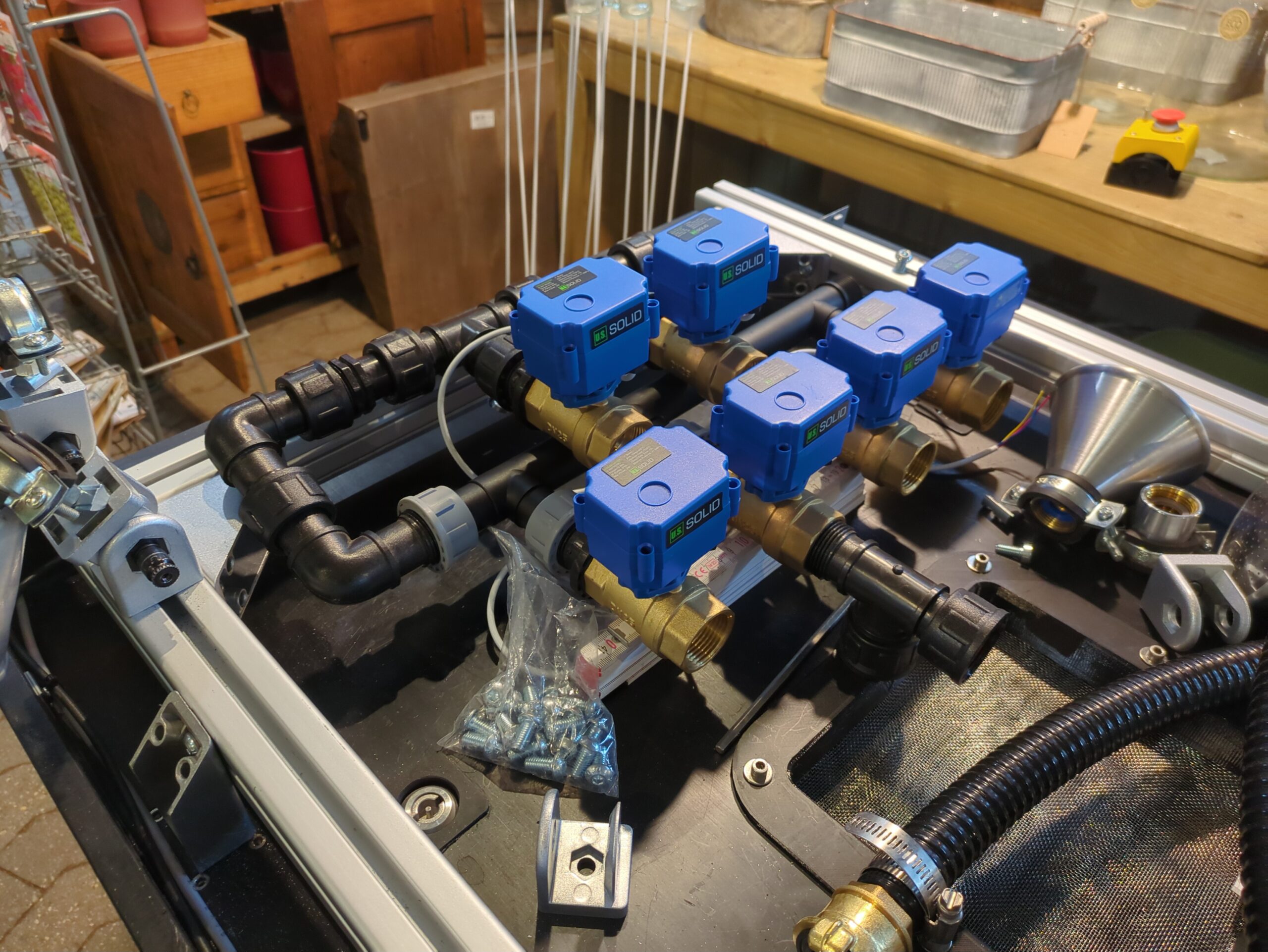
1. Schritt

Aufbau eines Befestigungsquadrates aus Profilschienen. Die Profilschienen haben wir einfach an die Vorbohrungen des Rainos (an denen normal die Gießrohre befestigt sind) montiert. Zuerst wollten wir die Wasserverteilung zu den Ventilen mit schönen Messingverteilern machen (die sind aber auch echt schick). Davon sind wir schnell abgekommen. Im Endeffekt haben wir Plastikverteiler genommen, weil diese doch etwas biegsamer und kleiner sind. Der Rainos hat mittig den Einfüllstutzn des Wassertanks. Dadurch ist der Platz extrem eingeschränkt. Wir mussten die Verteiler von 2 Seiten aufbauen. Ganz wichtig ist, hier KEINE normalen Magnetventile zu verbauen. Magnetventile nehmen enorm Druck weg und bei den Stromsparpumpen des Rainos macht das über 50% Wasserreduzierung. Besser sind die Motorkugelhähne. Funktionieren gut und haben wenig Druckverlust.
2. Schritt
- Um mit dem Rainos möglichst effektiv zu arbeiten wollten wir folgenden Düsenaufbau:
 Vorne rechts: Eine Düse die nach unten zielt (für Gräber an denen man mit 30cm Abstand steht) und gleich daneben eine Düse, die waagrecht zeigt um die hinteren Grabflächen zu erreichen.
Vorne rechts: Eine Düse die nach unten zielt (für Gräber an denen man mit 30cm Abstand steht) und gleich daneben eine Düse, die waagrecht zeigt um die hinteren Grabflächen zu erreichen. - Hinten rechts: Genau die gleiche Anordnung.
- Rechts Mitte: Ein Halbzoll-Schlauchstück mit dem wir, mit weichem Strahl, die Schalen gießen (und notfalls ein 12m entferntes Stauden- Gehölzgrab gießen können).
- Diese 5 Düsen sind, für höchste Flexibilität einzeln ansteuerbar.
Die Konfiguration der rechten Seite wurde eins zu eins auf die linke Seite kopiert. Mit einer Ausnahme: Links laufen die beiden vorderen Düsen und die beiden hinteren Düsen je über einen Motorkugelhahn.
3. Schritt
Zu den "Normalgebrauchdüsen" wurde rechts noch ein Rahmen mit ungefähr 60cm Höhe installiert. Hier sind zwei schmale (einzeln steuerbare) Düsen montiert. Diese spritzen mit einem relativ weichen Strahl bis 7,5m Entfernung. Durch die Höhe kommen wir auch über normal hohe Grabsteine, so dass wir damit problemlos in der zweiten und dritten Reihe gießen können.
4. Schritt
Die Schläuche anschließen. Innok Robotics (vielen Dank dafür ) ha it extra für uns die Steuerung Rainos erweitert. Damit kann man jetzt beide Pumpen gleichzeitig laufen lassen. Das haben wir im Aufbau berücksichtigt:
2 Ventile rechts vorne an eine Pumpe, 2 Ventile rechts hinten an eine Pumpe (und das gleiche auf der linken Seite). Dadurch können wir, mit sehr gutem Wasserdurchlass, 4 Düsen gleichzeitig laufen lassen und mit einem Anhaltepunkt ein Doppelgrab gießen. Wir schaffen damit ungefähr 70l in 20 Sekunden mit 4 Düsen zu gießen. Das ist ungefähr der gleiche Wert, wie mit unserem Gießtraktor mit 15 Bar Pumpe und einer extrem breiten Düse. Aus Zufall hatten wir verschiedenfarbige Schläuche im Haus. Damit sieht man sehr schön, welche Pumpe wohin geht.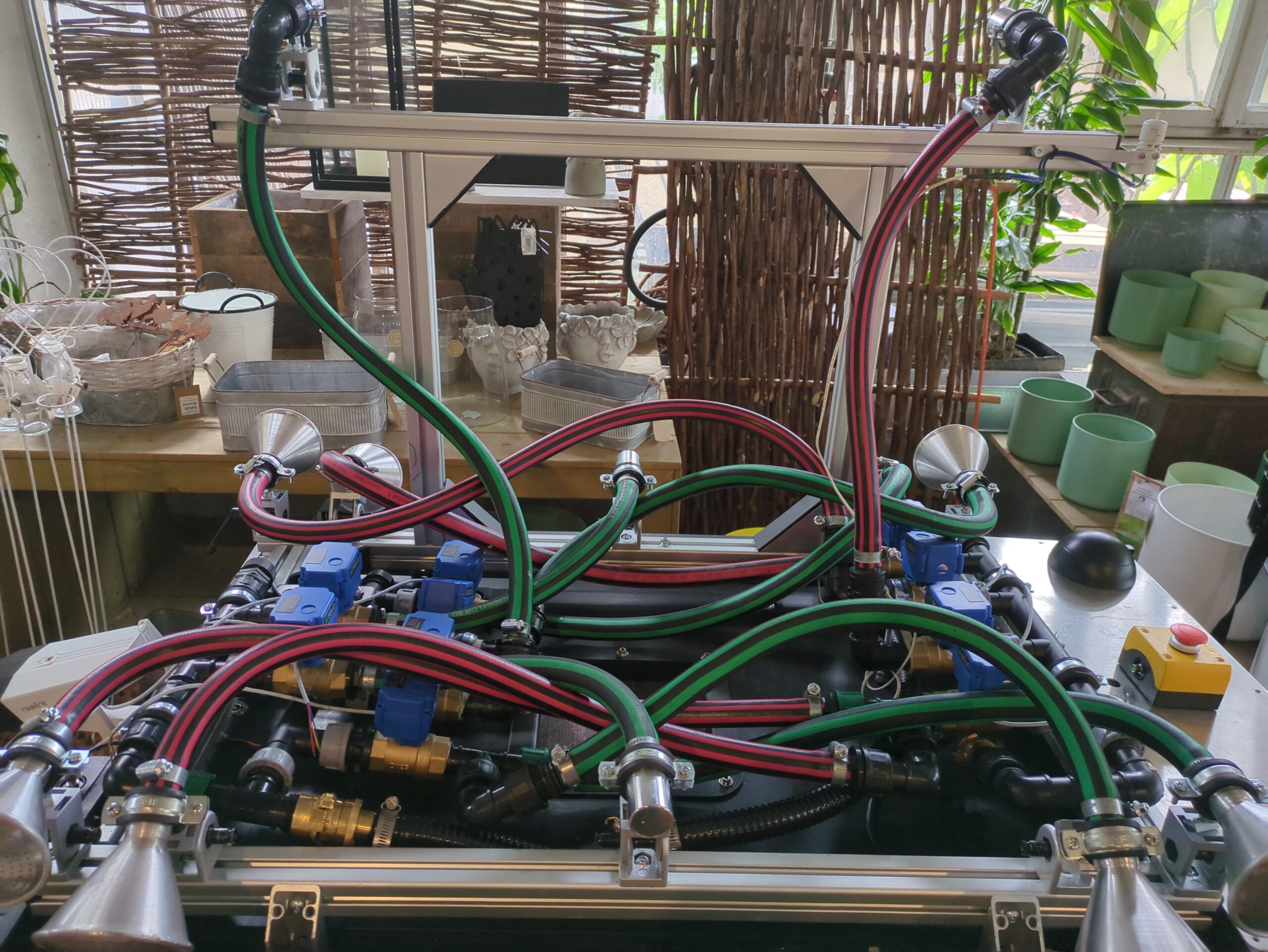
5. Schritt
Die Ansteuerung der Düsen. Der Rainos hat aktuell (bis 2024) keine seperate Steuerung von Motorkugelhähne dabei. Theoretisch geht das, praktisch fehlen aber für 9 Motorkugelhähne die Anschlüsse. Dadurch haben wir einen Bewässerungscomputer von uns im Schaltkasten verbaut. Dazu musste viel gepfuscht werden, um auf engem Raum unsere Steuerkomponenten zu verbauen. Theoretisch kann man als Bewässerungscomputer jeden fertigen Computer, der ein Steuern von Magnetventilen über das Netzwerk zulässt (oder jede andere Schalteinheit) verbauen. Wir haben auf die Steuerung aus Raspberry Pi Basis realisiert und 16 (die blauen im Bild) Relais daran angeschlossen. Als Steuersoftware haben wir auf dem Raspberry pi die Opensource-Version von Opensprinkler installiert. Vielleicht dokumentieren wir das mal, aber bis
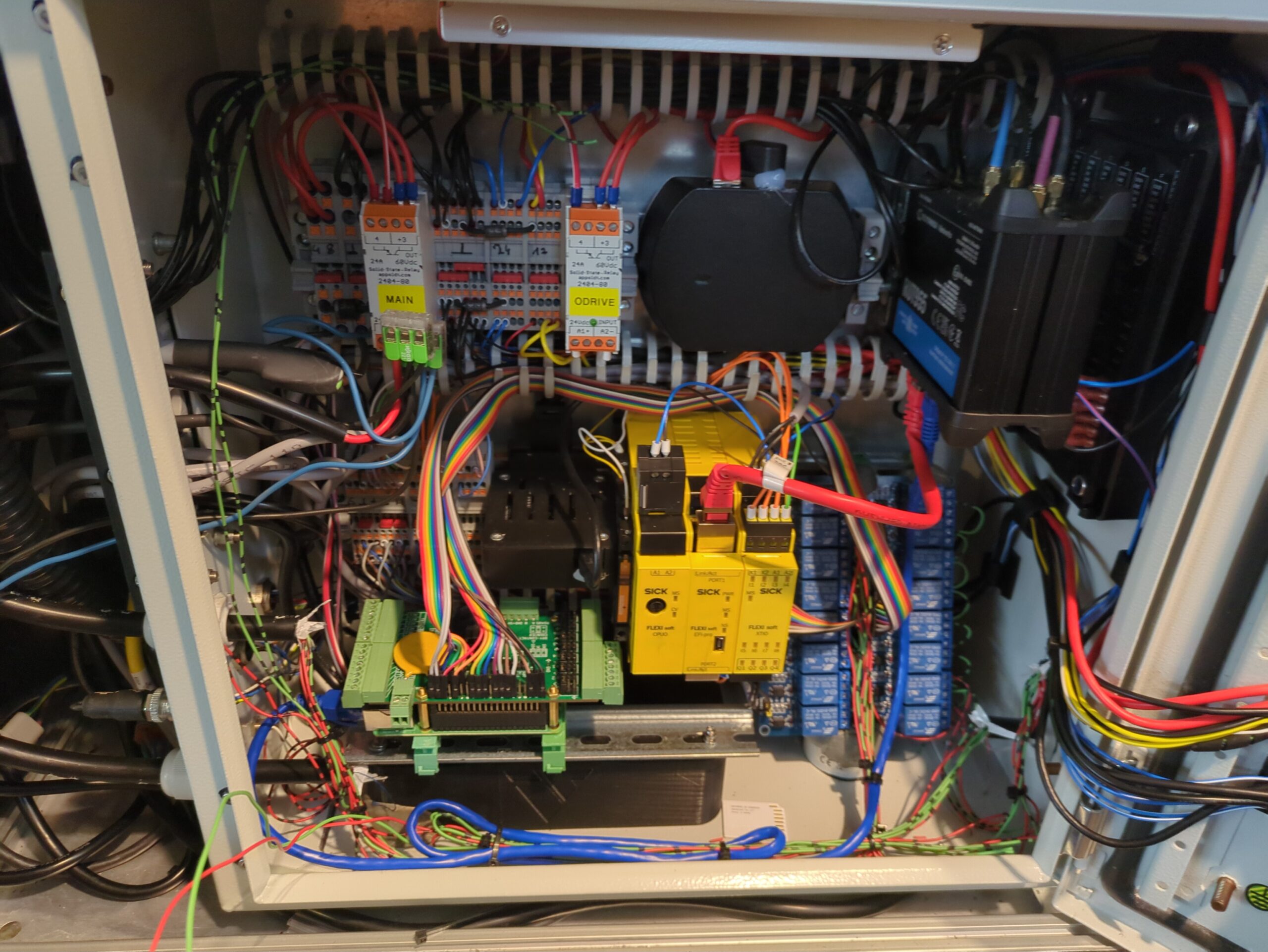
dahin einfach nach "Raspberry Pi Opensprinkler GPIO Relayboard" googeln und die vielen im Netz erhältlichen Anleitungen verwenden. Zusätzlich wurde an den Raspberry Pi noch einen Hunter Regenmelder angeschlossen. Unser Friedhof ist 35km vom Wohnort entfernt. Damit können wir sehr schön die Regenmenge erkennen und wissen, wann wir den Roboter abschalten dürfen.
6. Schritt
Akkuladen. Ich bin ein Fan von Innok Robotics - wirklich. Aber die offizielle Stromtankstation empfinde ich als falsche Entwicklung. Ich benötige keine Induktionsspule, die berührungslos lädt. Mir reicht, wie bei vielen Rasenmährobotersn, einfache Kontaktdongel, an die der Roboter fährt.
So haben wir das aus realisiert.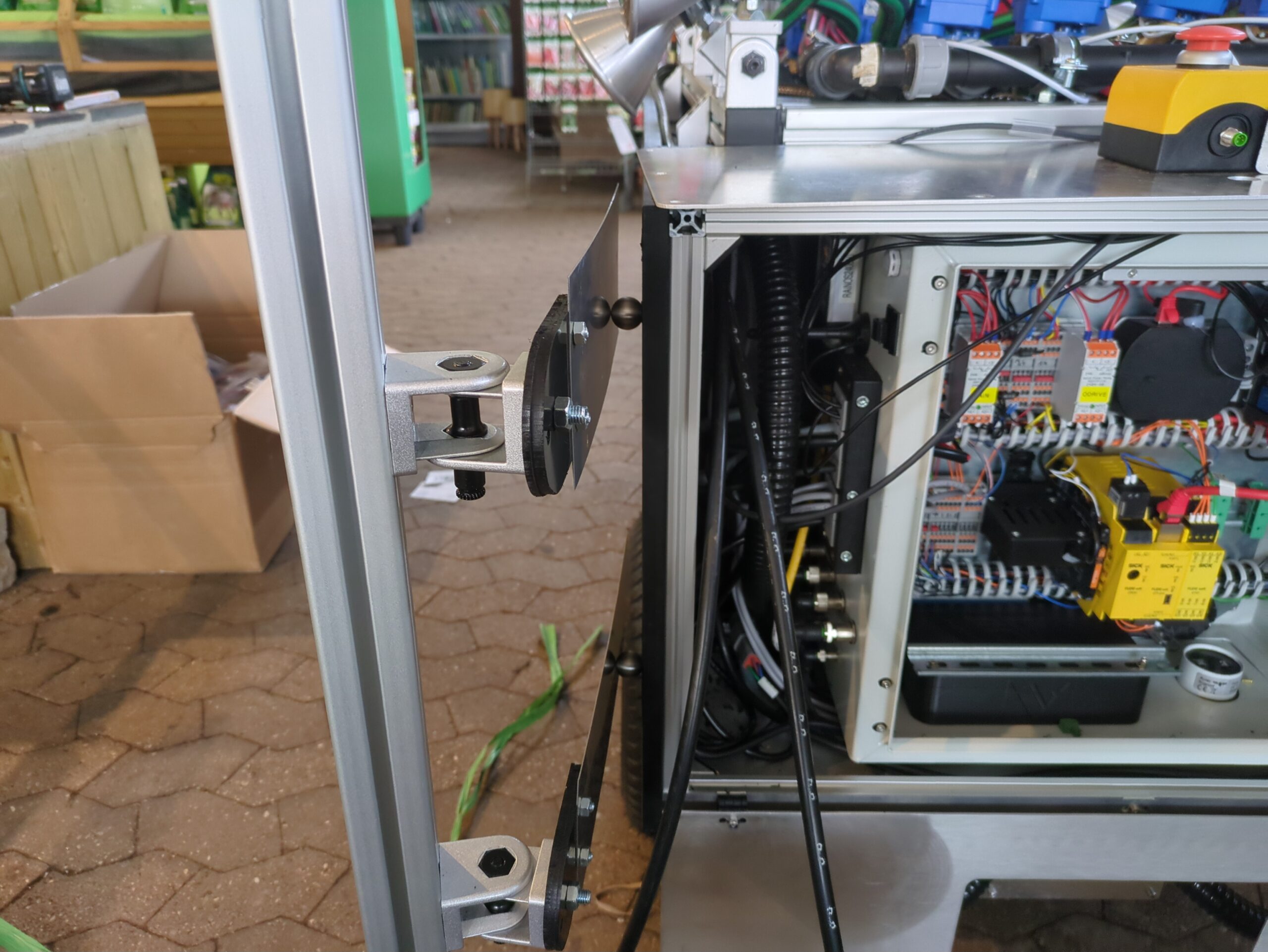
Seitlich zwei Edelstahlbälle an den Rainos montiert. Eine Ladestation (mit ungeeichten Stromzähler, damit wir mit dem Friedhof die Kosten abrechnen können) dazu. An die Ladestation 2 Edelstahl-Federlappen montiert und schon ist das fertig. Aktuell lieg bei uns (da waren wir zu faul, es über ein Relay laufen zu lassen) noch auf den beiden Edelstahlbällen Strom an (48v). D.h. wenn jemand wirklich saublöd ist und hier ein Metallstück dranhält, ist es ungut und er könnte krankenhausreif werden. Bei normaler Berührung, auch mit nassen Händen, sind die 48v aber ungefährlich. Sobald wir Zeit haben, werden wir das noch umbauen und das Relay noch Zwischenschalten ...
7. Schritt
Sowohl an der Ladestation, als auch dem Roboter haben wir eine Kamera verbaut. Das hilft ungemein und schützt uns tagsüber vor Vandalismus. Nachts hilft die Kamera, wenn der Roboter irgendwo feststeckt. Die normale Softwareoberfläche "Cockpit" erlaubt das Anzeigen der Laserdaten. Das reicht in vielen Fällen aus. Die Kamera macht es aber, als netter Zusatz, einfach leichter. Wir haben Reolink-Kameras verbaut: Die Nachtsicht ist gut, man kann das Nach-Hause-Telefonieren-nach-China abschalten und die Kamera lässt sich mit etwas Wissen in die eigene IT Struktur einbinden.
8. Schritt
Nach ein paar Vorbereitungen geht die Steuerung des Roboter ganz normal über die Cockpit Software von Innok. Dazu muss man wissen, dass Innok bei Gräbern Aktionen, wie das Ausführen eines Bashscripts, erlaubt. Wir haben daher 9 Scripte angelegt, die die einzelnen Motorkugelhähne steuern. Auch wenn wir hier zusätzliche Featurs eingebaut haben, wurden wir dabei wirklich vorbildlich von den Innok-Robotics Programmierern unterstützt. Dadurch war es möglich, trotz unserer Umbauten, die Orginalsoftware ohne Einschränkungen oder komplizierte Umwege weiter nutzen zu können. Ein herzliches Dankeschön hier nochmal.
9. Schritt
Kassensturz und Nachberechnung. Wir haben, mit Arbeitszeit und Material, ungefähr 9000 € für den Umbau aufgewendet. Dafür können wir 100% unserer Gräber gießen, haben einen enorm schnellen Gießvorgang und gießen Schalen treffsicher wassersparend. Die Kameras sind ein nettes Extra, das wir nicht mehr missen wollen. Der Regenmelder ist für uns extrem entspannend. Er schickt einfach eine Mail, wenn 6l/m² Regen heruntergefallen ist. Der schnelle Tankvorgang und das schnelle Gießen sind sehr leistungsfähig. Der Rainos tankt unter einer Minute (180l) nach. Wir gießen mit 120l / Minute. Einzig die langsame Geschwindigkeit mit 3,3km/h bremst bei weiten Wegen die Effektivität.
Testbilder:
Die weiten Düsen in der Gärtnerei: Doppelgrab gießen mit 4 Düsen gleichzeitig.
Doppelgrab gießen mit 4 Düsen gleichzeitig. Ein paar Punkte, die wir beim dritten Roboter anders machen werden:
Ein paar Punkte, die wir beim dritten Roboter anders machen werden:
- Wir brauchen vorne eine Düse. Damit kann man enge Wege auf das Grab zufahren, vorne gießen und ohne Drehung wieder rückwärts aus dem Grabfeld herausfahren.
- Der Schlüsselschalter muss nicht sein. Besser wäre eine Steuerung über ein Relay, damit man, wenn der Schlüssel irgendwo liegt, auch mit dem Handy arbeiten kann.
- Die Sicherheitsschiene vorne muss mittels Relay unterbrochen werden. Aktuell ist es so, dass wenn hier ein Kontakt besteht, als einziger Ausweg ein "Vorort mit der Fernsteuerung bewegen " besteht. Das sollte auch remote funktionieren. D.h. wenn ein Stein im Weg liegt, der vom Lidar nicht erfasst wird (weil zu niedrig), gleichzeitig aber auf Stoßleistenhöhe ist, steht der Roboter fest und lässt sich über die Entfernung nicht bewegen. Das kostet bei uns 2h Nachtschlaf und ist daher nicht so prickeln.
- Die Kameras sind nicht teuer und eine zweite Kamera hinten wäre schön.
aktuelle Produkte
-
 einzelne Rose ausdekoriert
6,50 €
einzelne Rose ausdekoriert
6,50 €
-
Zaunfigur 3fach 9x8x18cm
7,99 €
-
 Narcissus Bridal Crown, Topfosterglocke
3,99 €
Narcissus Bridal Crown, Topfosterglocke
3,99 €
-
 Myosotis, Myomark, veg. Vergißmeinnicht
3,99 €
Myosotis, Myomark, veg. Vergißmeinnicht
3,99 €
-
 Bellis Gänseblümchen
1,19 €
Bellis Gänseblümchen
1,19 €
Schreiben Sie einen Kommentar